
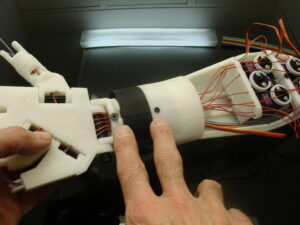
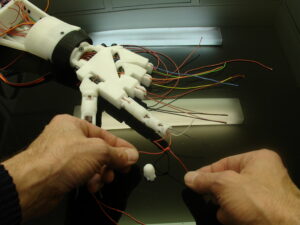
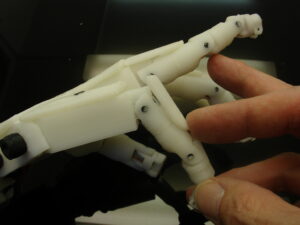
Trong bài bác này, họ sẽ tạo ra một cánh tay giả, cánh tay robot tựa như như bàn tay con bạn với sáu bậc thoải mái (năm dộng cơ cho những ngón tay với một cho cổ tay). Nó được tinh chỉnh và điều khiển bằng bàn tay con người, bằng phương pháp sử dụng một chiếc stress tay được gắn cảm ứng flex nhằm phản hồi những ngón tay và IMU cho bình luận góc cổ tay.
Bạn đang xem: Hướng dẫn làm cánh tay robot
Đây là những bản lĩnh chính của bàn tay:
Một bàn tay robot cùng với 6 bậc từ do. Toàn bộ các bậc thoải mái được điều khiển bằng phương pháp sử dụng servo.Cảm biến chuyển Flex: Năm cảm biến flex được gắn vào trong 1 chiếc bức xúc tay. Những cảm biến flex này hỗ trợ phản hồi mang lại vi điều khiển được sử dụng để điều khiển và tinh chỉnh cánh tay giả.IMU: IMU được sử dụng để lấy góc cổ tay.Hai evive (Arduino) dựa trên vi tinh chỉnh và điều khiển được sử dụng: Một thêm vào ức chế tay để điều khiển và tinh chỉnh góc cổ tay và chuyển động flex và mẫu còn lạị được đã nhập vào cánh tay để điều khiển servo.Phần tinh chỉnh từ bít tất tay tay và cánh tay giả giao tiếp với nhau bằng cách sử dụng Bluetooth.Có thêm hai bậc tự do thoải mái để cung cấp cho hoạt động theo khía cạnh phẳng X cùng Z của cánh tay, đấy là bước thiết kế thêm để hoàn thành nhiệm vụ phức tạp hơn.Hai vận động phụ được điều khiển bằng cách sử dụng phải điều khiển.Bây giờ, chúng ta sẽ đi sâu hơn vào bí quyết lắp ráp.
Bước 1: Tay với Forarm

Có rất nhiều mẫu kiến thiết cho tay và forarm bao gồm sẵn bên trên internet. Chúng tôi đã lấy trong những thiết kế từ In
Moov . Bạn có thể in 3d tại cachdung.com và linh kiện để gia công cánh tay tại link
Chúng tôi lựa chọn làm tay phải, vị vậy đó là những chi tiết cần thiết để in 3D:
1x Ngón cái1x Ngón trỏ1x Majeure1x Auriculaire1x Pinky1x Bolt_entretoise1x Wristlarge1x Wristsmall1x topsurface1x coverfinger1x robcap31x robpart21x robpart31x robpart41x robpart51x rotawrist21x rotawrist11x rotawrist31x WristGears1x Cable
Holder
Wrist
*Hướng dẫn gắn cánh tay giả:
i/

Cắt lớp giữa bằng dao rọc giấy bên trên Rob
Part2, 3, 4 với 5
Lắp Rob
Part2 cùng 5 với nhau
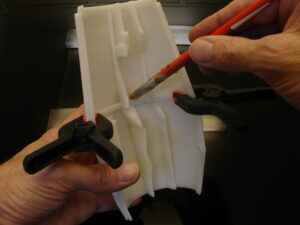
Dùng keo dán giấy để thắt chặt và cố định 2 chi tiết trên cùng với nhau

Làm tựa như với Rob
Part 3 và 4

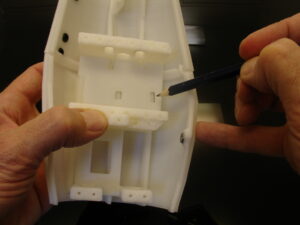
Khoan những lỗ lên Rob
Part2 bởi mũi khoan 6mm như hình nhằm thêm servo bổ sung cập nhật cho ngón cái.
Lắp các khớp nối đi kèm với servo vào Rob
Part2

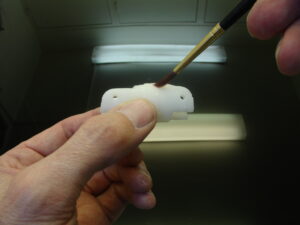
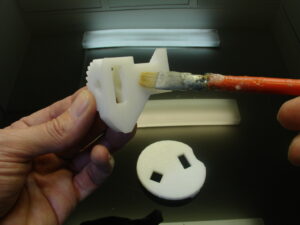
Trong Robpart5, chèn nhì đai ốc cho các bu lông 3mm. Nếu đai ốc bị nhô ra, làm cho nóng bọn chúng một chút kế tiếp chèn chúng nó vào lỗ làm thế nào để cho chúng không biến thành nhô ra nữa.
Chỉnh những lỗ bên trên đế servo nếu bọn chúng bị lỗi.
Đặt đế servo vào trong phần bên dưới của Robpart5.
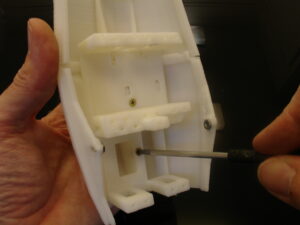
Dán keo dán hoặc cố định nó bằng 2 vít.


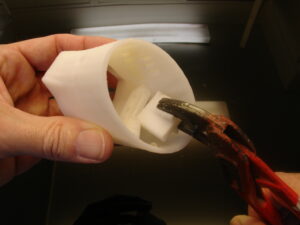
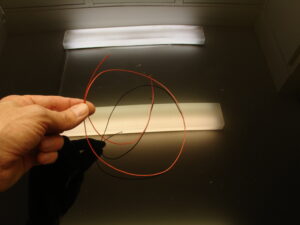
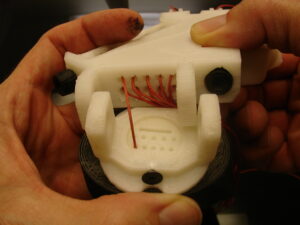
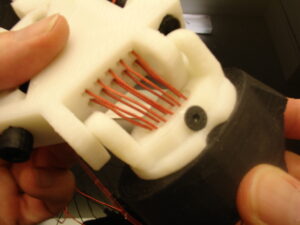
Tiếp theo, sử dụng chi tiết (Tensioner.stl) để giữ những dây bằng phương pháp sử dụng một lốc xoáy 0,5mm, chiều dài 1cm (13/64 ″ x13 / 16 ″). Sử dụng một ống nhựa nhỏ luồng qua lỗ tròn của lốc xoáy để điều khiển và tinh chỉnh dây, nó giúp tránh làm mòn dây.
QUAN TRỌNG: khi kéo căng chế tác sức căng mang đến dây, cố gắng giữ các lò xo không biến thành biến dạng (không kéo dài ra).Các xoắn ốc chỉ để hỗ trợ sự bất biến cho chiều dài của dây khi cổ tay quay.
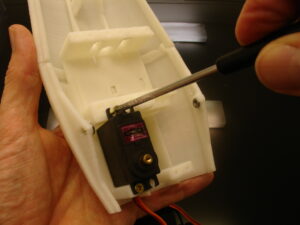
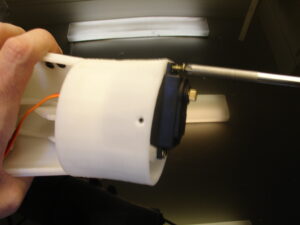
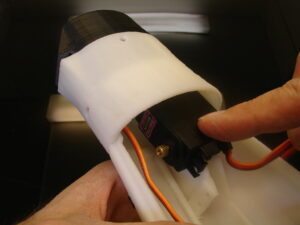
Tiếp theo, lắp những servo bởi vít vào đế servo.
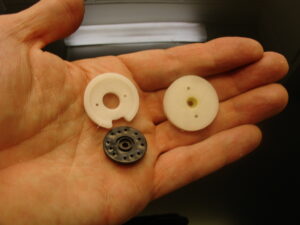
Đây là Rob
Ring với Servo
Pulley (màu trắng) dung để núm lên bánh răng của servo.

Chỉnh lại những lỗ bên trên Servo
Pulley bằng mũi khoan 2mm
Sử dụng những vít kèm theo với các servo của công ty để lắp thiết bị truyền hễ màu đen vào Servo
Pulley.

Cắt những đuôi vít bị dư ra
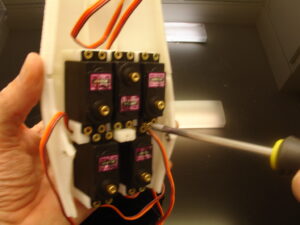
Bây giờ sử dụng sketch Arduino để thiết lập tất cả những servos của khách hàng ở 90 độ. Lắp vít tất cả các Servo
Pulleys lên servo như được hiển thị. Khi những Servo
Pulleys được núm định, sử dụng sketch một đợt nữa, đặt toàn bộ các servos thành 0 độ. Tránh dịch chuyển chúng trong các bước tiếp theo, trường hợp không các bạn sẽ cần phải kê lại bọn chúng về 0 độ.
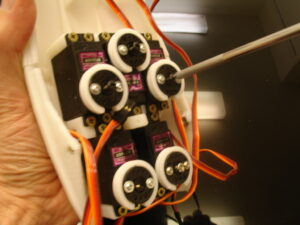
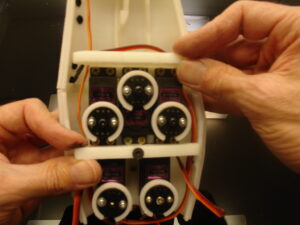
Gắn bên trên đế servo Rob
Cable
Front và Rob
Cable
Back.
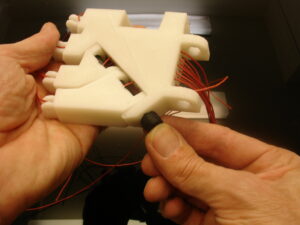
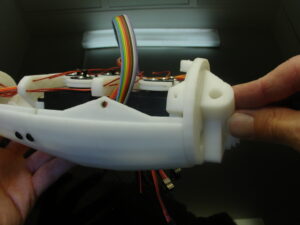
ii/
Trên Rota
Wrist1 bỏ phần hổ trợ như hình.

Chỉnh các lỗ bởi mũi khoang

Lắp Rota
Wrist1 vào Rosb
Part ở cách trên

Dùng cây dũa để mài nếu không lắp được
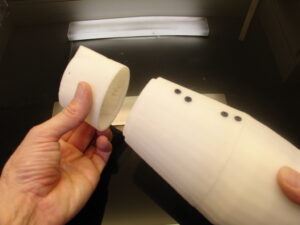
Lắp theo hình và cẩn trọng lắp ngược.

Dán keo dán giấy tại khớp nối của 2 đưa ra tiết
Lắp servo MG996 của công ty vào nhằm cổ tay quay 180 độ.
Lắp vít để thắt chặt và cố định servo.

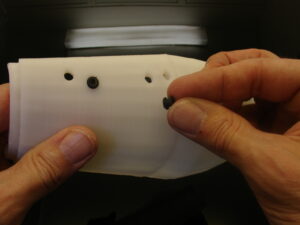
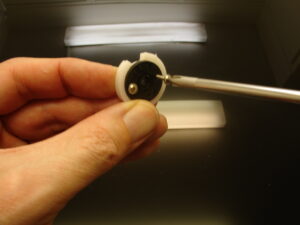
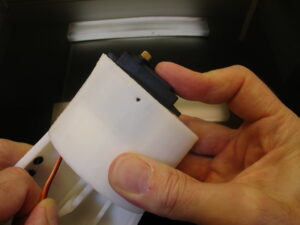
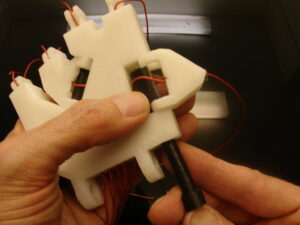
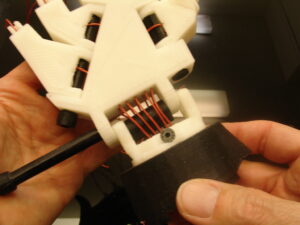
Khoan 1 lỗ như hình bằng mũi khoan 2.5mm lên Rob
Wrist2

Rota
Wrist2 được đánh màu đen để tránh bị té vàng
Hình hình ảnh này là nhằm hiển thị vị trí đặt servo phụ nếu như khách hàng sử dụng ngón dòng với hành vi kép.

Khoan 2 lỗ lên Rota
Wrist3 với mũi khoan 8mm




Gắn bánh răng theo hình


Bôi nhớt giữa các bánh răng.

Cố định Rota
Wrist3 vào Rota
Writ2 bằng vít
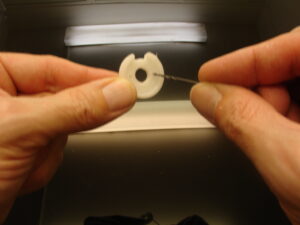
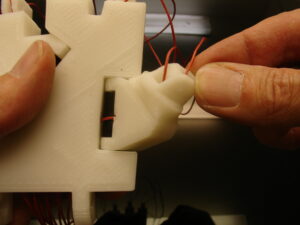
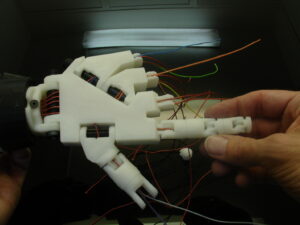
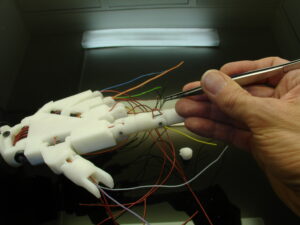
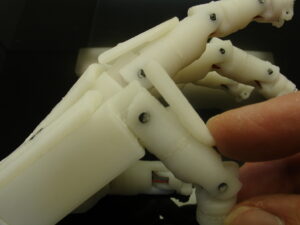
iii/ Lắp các ngón tay

Chỉnh lại các lỗ trên bạn dạng lề và đặt những ngón tay ở đa số bịch riêng.

Chỉnh bạn dạng lề quanh đó dùng mũi khoan 3mm.

Chỉnh bạn dạng lề trong cần sử dụng mũi khoan 3.2mm hoặc 3.5mm.

Mài các bạn dạng lề.
Dán keo các bạn dạng lề như hình

Sử dụng dây nhựa 3mm để làm chốt.

Nếu không có dây nhựa bạn cũng có thể thay bởi bu long 3mm.

Khoan lại các lỗ trên phần nắp đậy bằng mũi khoan 3mm.


Khoan Wristmall và Wristlarge cùng với mũi khoan 2.5mm để điều chỉnh nắp.



Khoan lại các bản lề của Wristmall cùng Wristlarge cùng với khoan 3.2 hoặc 3.5mm

Khoan lại các bản lề lớn bằng máy khoan 8mm.

Đảm bảo Bu lông hoặc Bu lông in chạy trót lọt tru và không xẩy ra lỏng.
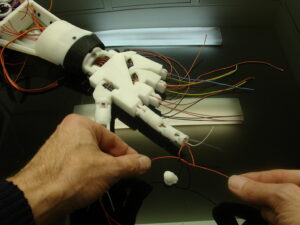
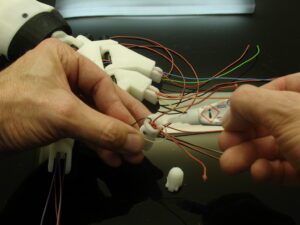
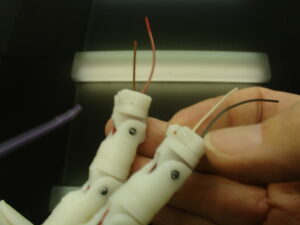
Cắt 10 dây nhựa lâu năm 75cm. Không thực hiện loại có thể co giản.
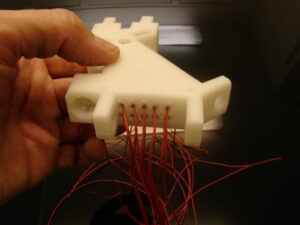
Chèn các dây vật liệu nhựa vào các lỗ Wristlarge.


Làm theo hình.
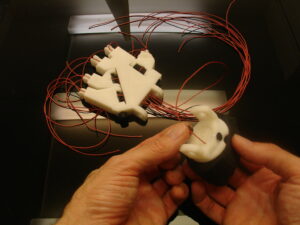
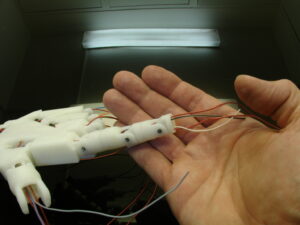
Lắp bàn tay vào cổ tay.

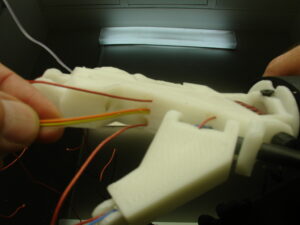
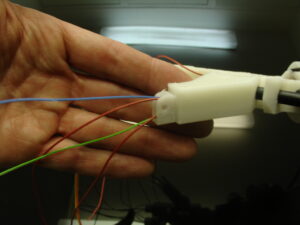
Lắp dây từ cổ tay vào cánh tay
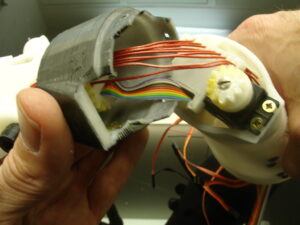
Bạn nên sử dụng dây khác màu nhằm phân biệt những ngón tay.
Làm theo hình.

Sử dụng vòng “C” để thắt chặt và cố định bu lông.

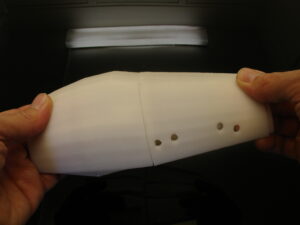
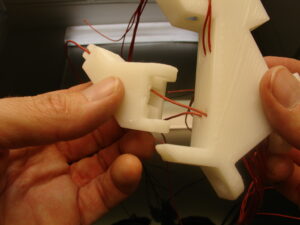
Đây là phương diện sau bàn tay khi gắn xong.
Xem thêm: Cách Trồng Hoa Linh Lan Ở Việt Nam, Hoa Linh Lan
Khi các bạn lắp cổ tay yêu cầu chỉnh servo ngơi nghỉ 90 độ và 2 vít trên hình được căn chỉnh.
Dán keo Rob
Cap vào Elbow
Shaft
Gear.
Bây giờ dán phần này vào Rob
Part5, bảo đảm an toàn nó được căn chỉnh vào các khe.
iv/ Lắp các ngón tay


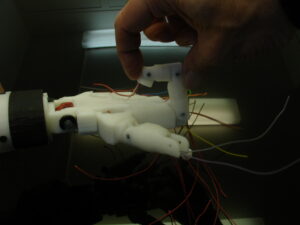

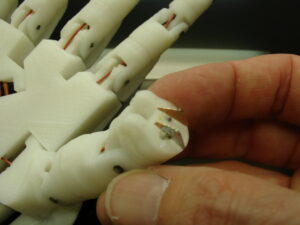
Lắp theo hình
Dán keo cho những ngón tay


Lắp nắp cho bàn tay và bình chọn độ linh hoạt của các ngón tay.
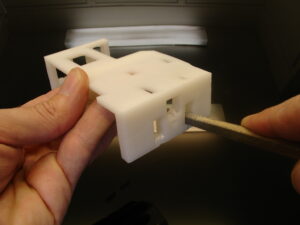
Bước 2: xây đắp trục Z





Chúng tôi đã xây đắp một bộ phần thiết lập cấu hình được gắn ở chỗ cuối của cánh tay có zắc cắm cho ổ bi với trục vít. Vòng bi được thực hiện để dẫn phía cánh tay theo trục z và chuyển động của trục được điều khiển bằng bộ động cơ và vít.
Các vít dẫn được xoay bằng phương pháp sử dụng một động cơ bước dẫn đến chuyển động đúng đắn của cánh tay robot.
Động cơ bước, trục và vít đều được lắp vào cụ thể in 3 chiều gắn vào cánh tay robot để di chuyển.
Bước 3: Trục X cùng khung




Như đang đề cập trong cách trước, phần tùy chỉnh cấu hình thứ hai được thiết kế để giữ hộp động cơ bước cùng trục. Hoạt động theo trục X cũng đều có các cụ thể tương từ với trục Z. Động cơ cách và cụ thể hỗ trợ trục được thêm trên một khung nhôm được làm bằng nhôm nghiền đùn 20mm x 20mm.
Bước 4: Chạy bộ động cơ bước: Sơ thứ mạch tinh chỉnh và điều khiển Ã988

Hình bên trên là sơ trang bị mạch. Dưới đó là các linh phụ kiện cần thiết:
Cần điều khiển và tinh chỉnh XYDây điệnTrình tinh chỉnh và điều khiển động cơ A4988Pin (12V)
Bước 5: Code động cơ bước
Chúng tôi sử dụng thư viện Basic
Stepper
Driver để điều khiển động cơ cách với evive. Giải mê thích code đối kháng giản:
Bạn có thể tải code tại link
Bước 6: cảm biến Flex

Cảm biến flex là một trong điện trở đổi mới đổi. Khả năng dẫn điện của cảm ứng flex tạo thêm khi uốn cong thanh Flex. Chúng tôi đã áp dụng năm cảm ứng flex nhiều năm 4,5 “để dịch chuyển ngón tay.
Cách dễ dàng nhất nhằm kết hợp cảm biến này vào dự án của cửa hàng chúng tôi là áp dụng nó như bộ chia điện áp. Mạch này yêu mong một năng lượng điện trở. Chúng tôi sẽ thực hiện một điện trở 47kΩ trong ví dụ như này.
Các cảm biến flex được đã nhập vào pin analog A0-A4 bên trên evive.
Bước 7: Hiệu chỉnh cảm biến Flex


Phạm vi của giá trị công ty chúng tôi nhận được tại chân analog của evive từ các cảm ứng flex không giống nhau cho mỗi cảm biến. Do đó họ phải ghi lại phạm vi cho từng cảm biến.
Bằng giải pháp sử dụng màn hình sạc pin State evive, nó đang hiển thị đã đạt được giá trị ở góc cạnh khác nhau.
Pin State Monitor hiển thị trạng thái toàn bộ các chân digital với analog của evive. Nó cho thấy đầu ra là cao hoặc thấp mang lại chân digital và giá trị tương tự như cho những chân analog. Các chân được hiển thị ngơi nghỉ dạng bảng trên màn hình.
Video làm việc trên là một trong ví dụ công ty chúng tôi đang theo dõi quý hiếm cần tinh chỉnh trên chân analog A0 cùng A1.
Bước 8: Khâu cảm ứng Flex trên găng tay tay

Bây giờ bọn họ phải khâu các cảm ứng flex trên găng tay tay. Chúng tôi lựa chọn một chiếc stress tay len. Trước tiên, đeo áp lực tay lên tay nhằm các cảm ứng flex hoàn toàn có thể được gắn thêm vào ức chế tay dễ dàng dàng. chúng tôi đang khâu những cảm biến bằng phương pháp sử dụng keo dán dán. Sử dụng dây nối để tang khoản bí quyết cho cảm biến.
Bước 9: IMU


Để cảm giác được góc cổ tay, công ty chúng tôi đã sử dụng cảm biến MPU-6050.
Cảm trở thành MPU-6050 tất cả bộ tốc độ MEMS và con quay hồi chuyển MEMS trong cùng một bé chip. Nó rất chính xác, bởi nó cất 16 bit giống như với phần cứng biến đổi digital cho mỗi trục. Do đó, nó nhận biết trục x, y cùng z cùng một lúc. Cảm biến áp dụng bus I2C để giao tiếp với Arduino.
Hiển thị sinh hoạt trên là sơ vật dụng mạch để nối cảm biến IMU6050.
Chúng tôi áp dụng Thư viện Arduino MPU6050 để nhận dữ liệu từ tài liệu cảm biến.
Cảm biến được gắn thêm trên bao tay tay bằng băng keo.
Bước 10: thông số kỹ thuật Bluetooth Master Slave

Như vẫn nói ở trên, giao tiếp hai evive bằng cách sử dụng nhì Bluetooth. Đối cùng với giao tiếp, một Bluetooth yêu cầu được đặt có tác dụng Master cùng một là Slave.
Để thông số kỹ thuật Bluetooth, chúng ta cần đưa sang cơ chế lệnh AT. Trước tiên, chúng ta cần kết nối các mô-đun bluetooth không dây để evive như mạch được hiển thị làm việc trên. Có một khe cắm chuyên được dùng cho mô-đun Bluetooth, chỉ cần cắm một trong các hai mô-đun Bluetooth. Hãy lưu giữ nhấn công tắc nguồn trên mô-đun khi nối nó trong khoảng 3-5 giây. Giao tiếp được tiến hành thông qua cổng tiếp liền 3 của evive.
Dưới đấy là code để giao tiếp với HC05.
Cấu hình Slave
Mở Serial Monitor, thiết lập cấu hình tốc độ truyền đến 115200 và cơ chế thành NL & CR. Bây tiếng gõ những lệnh sau:
AT: Đã dấn đượcAT + UART ?: Đã thừa nhận được tốc độ truyền. Đặt nó thành 38400 nếu khách hàng muốn
AT + UART = 38400,0,0: đổi khác tốc độ truyền thành 38400AT + Role = 0: Đặt role thành slave
AT + ADDR ?: Đã dấn được showroom mô-đun Bluetooth
Bây giờ họ cần ghi lại add này vì chúng ta sẽ nên nó khi cấu hình thiết bị master.
Cấu hình chính
Bây giờ họ cấu hình mô-đun Bluetooth còn sót lại làm thiết bị chính. Đầu tiên, họ sẽ kiểm tra vận tốc truyền để đảm bảo nó là 38400 giống như thiết bị slave.
Làm theo những lệnh:
AT: Đã dấn đượcAT + UART ?: Đã nhận được tốc độ truyền. Đặt nó thành 38400AT + UART = 38400,0,0: biến đổi tốc độ truyền thành 38400AT + Role = 1: Đặt role thành master
AT + CMODE = 0AT + BIND = ĐỊA CHỈ TRƯỚC
Bluetooth.into
Bước 11: Code sau cuối cho bức xúc tay

Sau khi tích hợp toàn bộ các cảm biến trên evive và công nghệ bluetooth slave, bọn họ sẽ chế tác code gởi trạng thái mang đến evive còn lại.
Chúng tôi sẽ sử dụng chính sách digital, có nghĩa là công ty chúng tôi đã tùy chỉnh một ngưỡng cho mỗi cảm biến flex.
Dưới đấy là code cuối cùng.
Slave.into
Bước 12: Code mang đến cánh tay và động cơ bước
Việc điều khiển và tinh chỉnh evive cánh tay tất cả mô-đun Bluetooth thiết yếu và nhấn được những lệnh trường đoản cú evive và giải mã nó.
Servos được gắn vào các chân PWM của evive. Sơ đồ vật mạch ở đầu cuối được hiển thị làm việc trên.
Đây là 1 mặt hàng được nói đến trong 1 bài báo technology uy tín quốc tế. Trình bày phương pháp hiệu trái trong việc xây dựng bộ điều khiển cho Cánh tay Robot 3 bậc từ bỏ do Fischertechnik. Sau đây hãy thuộc Uniduc tìm hiểu nghiên cứu vớt và khảo sát robot 3 bậc tự do thoải mái này nhé.
Tổng quan lại về cánh tay Robot 3 bậc
Ngày nay, tay lắp thêm hay cánh tay Robot đang được áp dụng không ít trong những ngành sản xuất technology cao. Với không thiếu chức năng cân xứng tất cả loại sản xuất như: sơn, hàn, bốc vác, gắn đặt,… vày vậy, nhu cầu đổi mới cũng như trở nên tân tiến ứng dụng Robot đang được các hãng sản xuất Robot cực kì quan tâm. Mỗi sản phẩm cánh tay Robot luôn cân xứng với những quá trình khác nhau. Những quá trình đòi hỏi sự chính xác tính xảo thì cần cánh tay Robot 6 bậc trở lên, những các bước đơn giản chỉ nên vận chuyển sản phẩm & hàng hóa thì nên cánh tay Robot 3 bậc trở xuống là rất có thể đáp ứng được nhu cầu.
Cánh tay Robot 3 bậc bao gồm 3 khớp quay cân xứng với những quá trình yêu ước độ đúng chuẩn trung bình. Nó bao gồm kích thước nhỏ và giá tốt hơn rất nhiều so với các loại cánh tay tất cả số bậc cao hơn.
Fischertechnik là 1 quy mô Robot được chế tạo bởi nhà sáng chế DR Artur Fischer người Đức vào khoảng thời gian 1964. Sản phẩm phù hợp để làm thí nghiệm cho những ngành tự động hóa, sản xuất máy của những trường đại học. Dường như các đơn vị phân phối phần mềm phần cứng béo cùng dùng quy mô này để trình diễn mô phỏng dây chuyền sản xuất của bạn như: BMW tuyệt Siemen. Với chi tiêu khoảng 400$ / 1 bộ mô hình chính hãng, khá tương xứng với doanh nghiệp tương tự như trường học. Nhưng lại đối với cá thể muốn nghiên cứu khám phá thì còn khôn xiết đắt. Hiện nay, Robot hoàn thiện hơn cùng với việc lắp ráp thêm Vision để tăng mức độ chính xác.
Phương pháp thực hiện mô hình Robot 3 bậc trường đoản cú do
Tổng quan lại về quy mô cánh tay robot 3 bậc
Hệ thống robot có những thành phần bao gồm sau:
1 quy mô cánh tay Robot Fischertechnik: Robotic TXT Automation Robot – đấy là cánh tay Robot 3 bậc từ bỏ do. Gồm tọa độ trụ cùng phạm vi thao tác làm việc hình trụ trong ko gian)1 quy mô băng sở hữu (Conveyor) được lắp từ khối Fischertechnik1 khay chứa sản phẩm cũng được lắp ghép tự Fischertechnik1 Camera Webcam hxsj S201 cảm biến tiệm cận E18-D80Và 1 mạch Arduino Mega để điều khiển và tinh chỉnh mô hình
Nguyên lý điều khiển
Băng cài có trách nhiệm đưa thành phầm đến địa điểm cánh tay Robot, lúc đến gần cảm ứng E18-D80. Cảm ứng nhận diện được thành phầm và truyền thông tin về bộ tinh chỉnh Arduino Mega làm băng download dừng. Tiếp sau bộ điều khiển truyền thông tin mang lại tọa độ được setup sẵn phía bên trên sản phẩm. Camera nhận diện lại vị trí màu sắc và tiến cánh tay robot tiến hành gắp thành phầm qua mạch L293D tinh chỉnh công suất. Bộc lộ hình hình ảnh sẽ gởi về bộ điều khiển trung tâm để mang về vị trí hàng đúng màu sắc đã cài đặt đặt.

Tìm hiểu thông số kỹ thuật của bộ động cơ ở các khớp
Phạm vi làm việc theo từng loại khớp
| Khớp | Loại khớp | Phạm vi có tác dụng việc |
| 1 | Khớp quay | Quay trái chiều kim đồng hồ, 00 mang đến 3600 |
| 2 | Khớp tịnh tiến | Tịnh tiến theo chiều cao từ 0cm mang đến 15cm |
| 3 | Khớp tịnh tiến | Tịnh tiến theo phương ngang trường đoản cú 0cm cho 9cm |
Thông số kỹ thuật đụng cơ
| Động cơ | Nguồn cấp cho (V) | Công suất (W) | Vận tốc (vòng/phút) |
| DC tích vừa lòng encoder | 9 V | 1,2 W | 105 vòng/phút |
| XS motor DC | 9 V | 1 W | 6000 vòng/phút |
Bài toán tinh chỉnh tọa độ cánh tay Robot 3 bậc
Để điều khiển đúng đắn vị trí Robot phải đến điều đầiều tiên phải xác minh được cội tọa độ, phương trình đụng học thuận với nghịch của Robot. Nguyên tắc điều khiển cánh tay Robot:

Đưa ra tọa độ mong ước (X,Y,Z) từ kia các thông số vị trí các khớp xoay Robot được tra cứu qua phương trình đụng học ngược. Giá trị thông số kỹ thuật khớp này sẽ được đối chiếu với thông số kỹ thuật khớp được ý kiến về từ cảm ứng Encoder. Rơi lệch sẽ được bộ tinh chỉnh xử lý và ảnh hưởng trực tiếp vào hộp động cơ của cánh tay. Các thông số khớp được phản hồi tiếp tục từ Encoder, qua phương trình cồn học thuận. Những vị trí tọa độ lúc này của khâu chấp hành và tính theo thời gian thực
Lab
VIEW giải pháp xử lý hình ảnh
Lab
View phân loại color theo 16 kệ trong khoảng từ 0 đến 15 (màu xanh ở phần kệ 6 và trắng làm việc kệ 15). Hàm sẽ phân loại để đặt sản phẩm vào ô tương xứng chính xác. Để xác minh đúng chọn ngưỡng tham chiếu giá chỉ trị lớn hơn 0.4. Nếu quý giá thuộc kệ 6 lớn hơn 0.4 thì xác định đó là màu sắc xanh, và giống như với kệ 15 để khẳng định màu trắng. Lưu đồ vật tổng quát

Giao diện phần mềm
Lưu thiết bị thuật toán công tác điều khiển

Giao diện điều khiển thủ công (Manual)

Giao diện điều khiển auto (Auto)

Mô phỏng quy mô cánh tay Robot 3 bậc
Chúng ta đang mô bỏng trong Simmechanics của Matlab để có thể thay đổi mô hình Autodesk Inventor. Từ bỏ Inventor thanh lịch Simulink bên dưới dạng khối. Mô hình trong Simulink Matlab

Thuật toán điều khiển
Bộ tinh chỉnh và điều khiển PID được dùng để điều khiển cánh tay Robot 3 bậc từ bỏ do được thiết kế như sau

Trên đấy là một số kỹ năng của công ty chúng tôi về ứng dụng của bộ mô hình cánh tay Robot 3 bậc Fischertechnik. Các bạn có thể xem thêm những nội dung bài viết và phương án công nghệ mới nhất tại Uniduc.








